RTK多車両 車間距離計
RTK GVS速度·距離計を活用した
RTK多車両 車間距離計
国内初方式
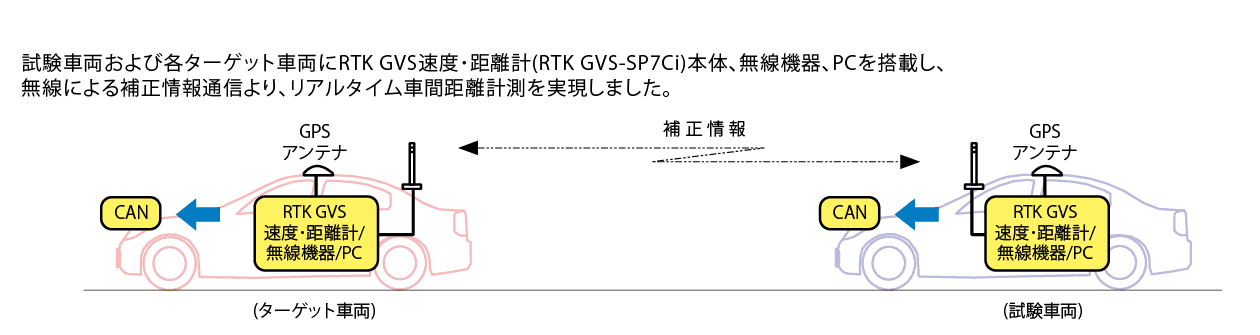
固定基地が不要なRTK GVS速度・距離計を
2台~最大5台の試験車両へ搭載。
車両間で補正情報を無線通信し、
±2cm精度の車間距離を
リアルタイムで計測するシステムで、
自動運転・ADASの評価に最適です。
特徴
- 電源ON、衛星測位直後から車間距離精度±2cm
・速度精度0.1km/hのリアルタイム計測が可能 - BaseStation(固定基地局)が不要の為
・試験エリアの制約を受けません・テストコース外での試験も可能にしました
・長距離の車間距離計測も可能です - 2周波(L1、L2)及びGPS/GLONASS受信機を内蔵
橋梁通過等の場合でも、衛星測位の復帰が早く直後から車間距離精度は±2cm - 最大1対4車両の車間距離計測が可能
- CAN出力に対応しています
- 機器取付が簡単に設置できます
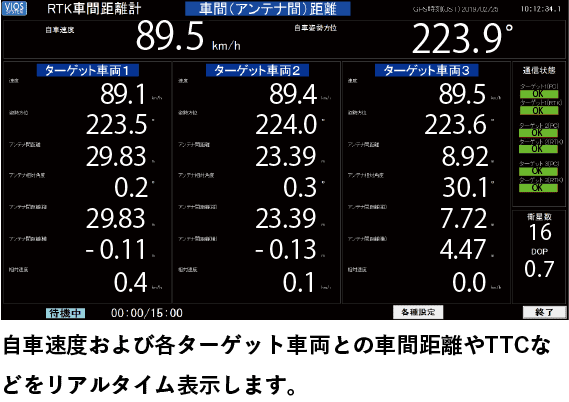
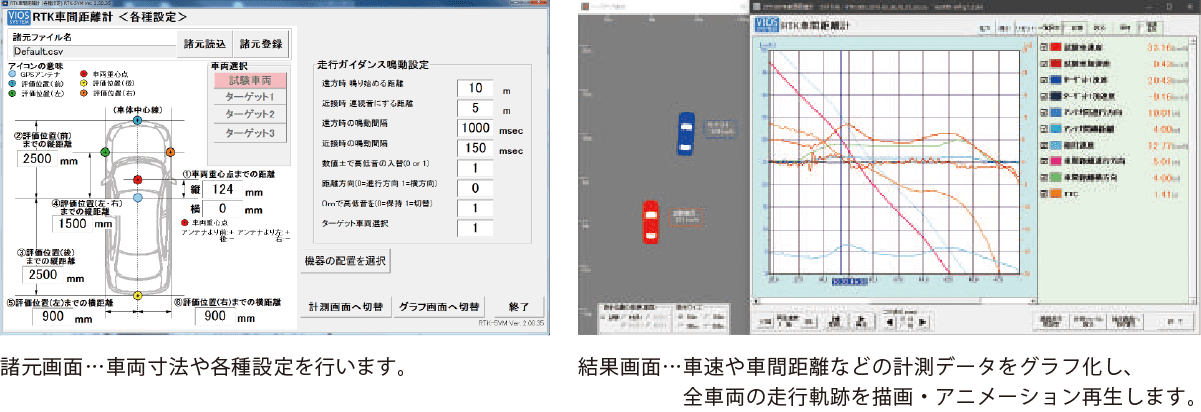
計測画面(試験車両)
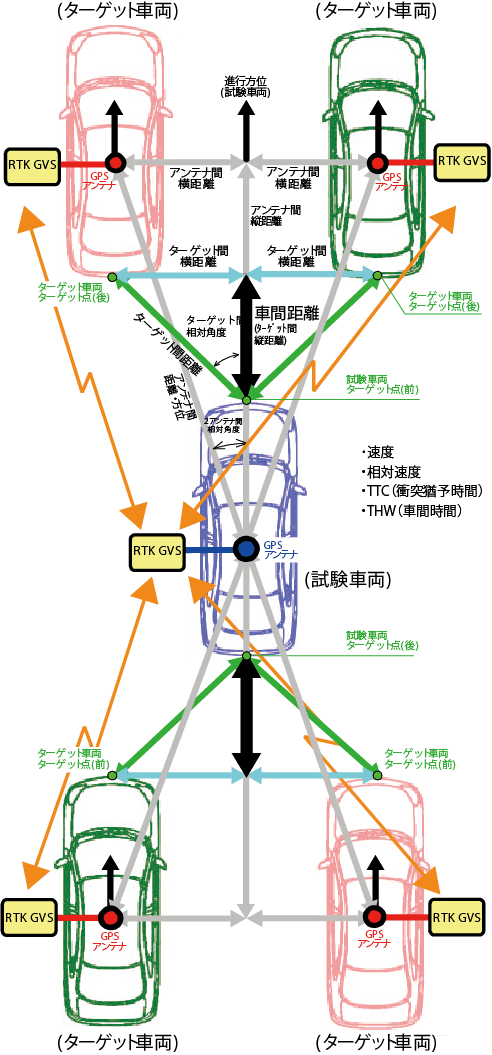
[車間距離計測における取得データ]
-
車間距離(ターゲット間 縦距離)
[m] -
TTC(衝突余裕時間) [車間距離÷相対速度]
[s] -
THW(車間時間) [車間距離÷自車速度]
[s] -
相対速度
[km/h] -
自車速度
[km/h] -
自車加速度
[m/s2] -
自車進行方位
[°] -
アンテナ間 距離
[m] -
アンテナ間 縦距離・横距離
[m] -
アンテナ間 相対角度
[°] -
各ターゲット間 横距離
[m] -
各ターゲット間 相対角度
[°] -
各ターゲット車速度
[km/h] -
各ターゲット車進行方位
[°]
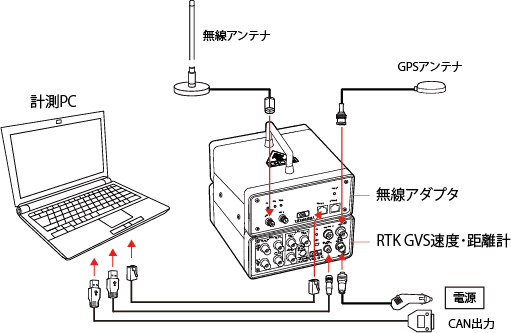
車間距離計測 システム構成
ソフトウェア画面
仕様
- データ項目
- 精度
- 車間距離(ターゲット間 縦距離)
- 0.02m
- TTC(衝突余裕時間)
- 0.05s
- THW(車間時間)
- 0.05s
- 自車速度
- 0.1km/h
- 自車減速度
- 0.05m/s2²
- 自車進行方位
- 0.1°
- ターゲット車両速度
- 0.2km/h
- ターゲット車両進行方位
- 0.1°
- 相対速度
- 0.2km/h
- ターゲット間 距離
- 0.02m
- ターゲット間 横距離
- 0.02m
- ターゲット間 相対角度
- 0.1°
- アンテナ間 距離
- 0.02m
- アンテナ間 縦距離
- 0.02m
- アンテナ間 横距離
- 0.02m
- アンテナ間 相対角度
- 0.1°
機器構成(1車両分)
PC/RTK間通信用無線アダプタ