RTK
自動レーンチェンジ評価計
RTK GVS速度·距離計を活用した
RTK
RTK
自動レーンチェンジ評価計
特徴
- RTK自動レーンチェンジ評価計は固定基地局式のRTK GVSシステム
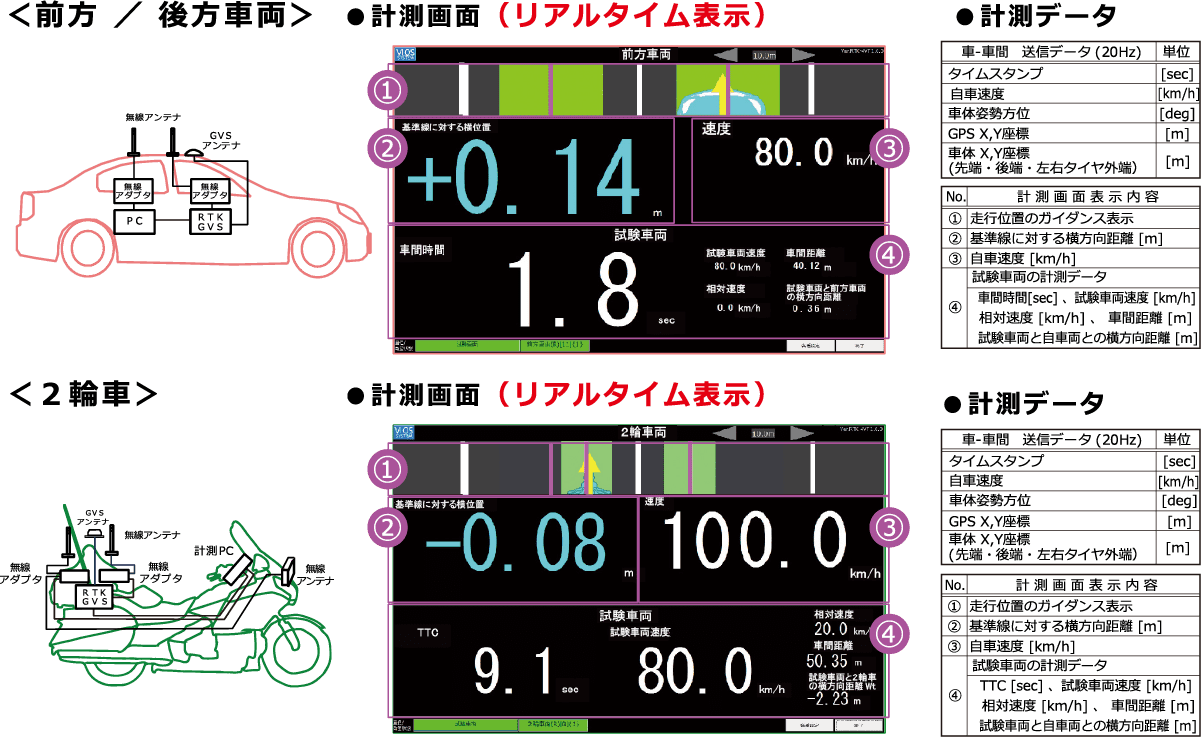
- 各車両は試験要件(白線に対する各車両の位置・試験車両に対する各車両の相対位置)を計測・演算して計測画面へリアルタイム表示
- 試験車両のCANデータを読込みRTK GVSの計測データと同期処理して保存
- 各車両における位置精度は±2cmと高精度
自動運転「レベル2」走行試験
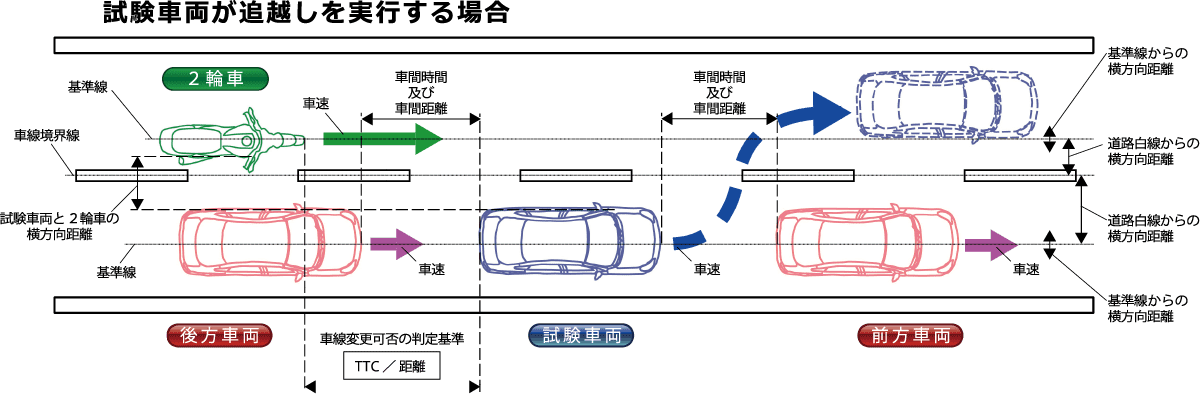
試験イメージ
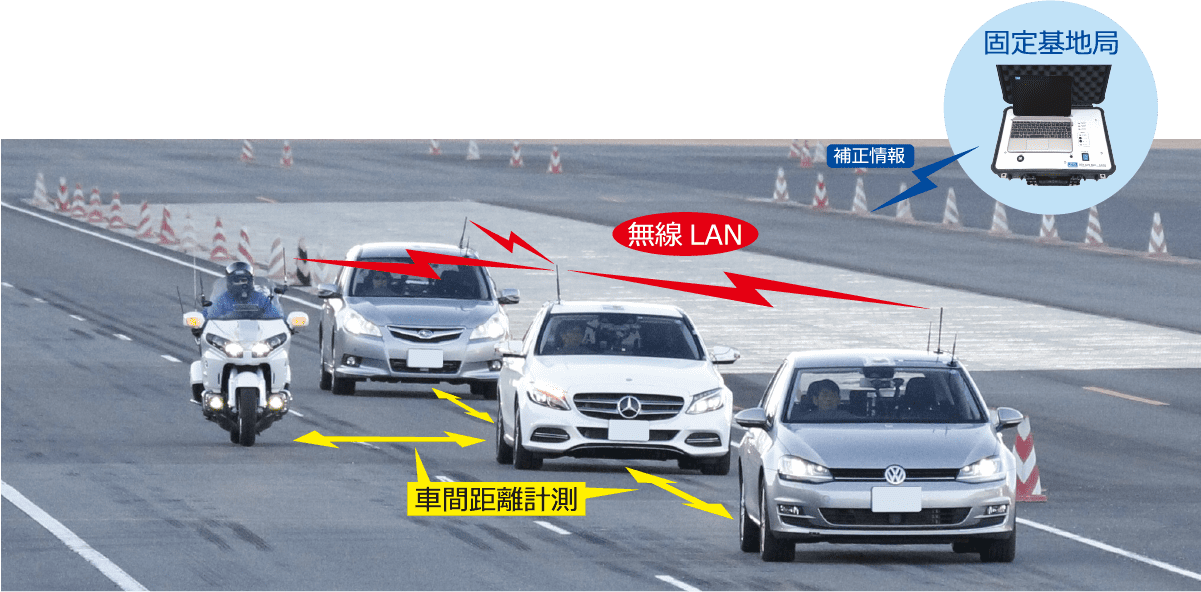
計測装置概要
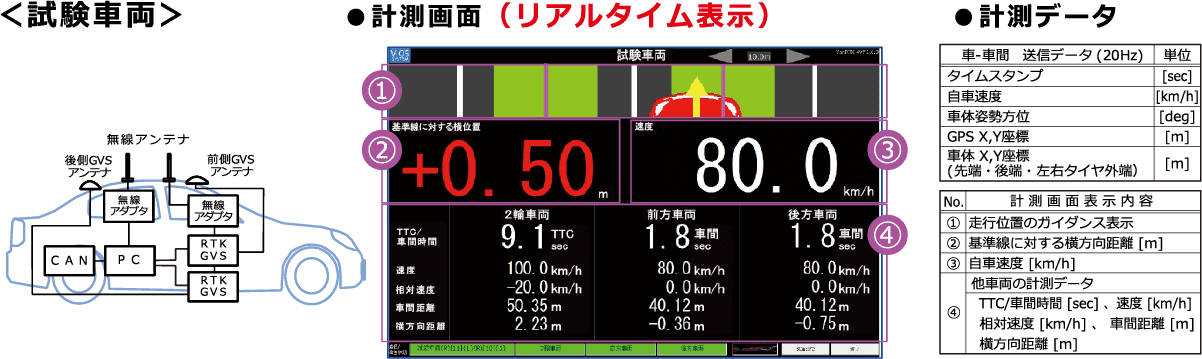
計測データ
全車両の計測データは試験車両へ集約し、CSV形式で同一ファイルへ保存します。
| データ区分 | 試験車両PCへの保存データ(100Hz)単位 | |
|---|---|---|
| 試験車両 | 自車速度 | [km/h] |
| 基準となる道路白線に対する横方向距離(左) | [m] | |
| 基準となる道路白線に対する横方向距離(右) | [m] | |
| 基準となる道路白線に対する横方向距離(重心) | [m] | |
| 基準線に対する横方向距離(重心) | [m] | |
| ヨー角 | [deg] | |
| ヨーレート | [deg/s] | |
| 操舵角計 | [deg] | |
| 横加速度 | [m/s2] | |
| 前方車両 | 自車速度 | [km/h] |
| 基準となる道路白線に対する横方向距離(左) | [m] | |
| 基準となる道路白線に対する横方向距離(右) | [m] | |
| 基準となる道路白線に対する横方向距離(重心) | [m] | |
| 基準線に対する横方向距離(重心) | [m] | |
| 前方車両 対 試験車両 |
試験車両からの横方向距離 | [m] |
| 試験車両との車間距離1 追越前 | [m] | |
| 試験車両との車間時間1 追越前 | [sec] | |
| 試験車両との車間距離2 追越後 | [m] | |
| 試験車両との車間時間2 追越 | [sec] | |
| 試験車両との相対速度 | [km/h] | |
| 後方車両 | 自車速度 | [km/h] |
| 基準となる道路白線に対する横方向距離(左) | [m] | |
| 基準となる道路白線に対する横方向距離(右) | [m] | |
| 基準となる道路白線に対する横方向距離(重心) | [m] | |
| 基準線に対する横方向距離(重心) | [m] | |
| 後方車両 対 試験車両 |
試験車両からの横方向距離 | [m] |
| 試験車両との車間距離 | [m] | |
| 試験車両との車間時間 | [sec] | |
| 試験車両との相対速度 | [km/h] | |
| 2輪車 | 自車速度 | [km/h] |
| 基準となる道路白線に対する横方向距離(重心) | [m] | |
| 基準線に対する横方向距離(重心) | [m] | |
| 2輪車 対 試験車両 |
試験車両からの横方向距離 | [m] |
| 試験車両とのTTC | [sec] | |
| 試験車両との距離 | [m] | |
| 試験車両との相対速度 | [km/h] | |